

SMART Ziele Die Arbeitsziele sollen „Spezifisch, Messbar, Anspruchsvoll, Realistisch, Terminiert“ (SMART) sein. In diesem Rahmen lassen sich für CiLoCharging folgende SMART-Ziele definieren: Smart-Ziel 1: Optimierung des Lademanagements im Logistikterminal mit Integration des Verkehrsmanagement und der Energieversorgung Die Projektpartner entwickeln eine bedarfsgerechte, flexible „Optimization-as-a-Service“ Komponente, die unter Einbeziehung aller relevanten Eingangsdaten aus den einzelnen Domänen die […]
Read More
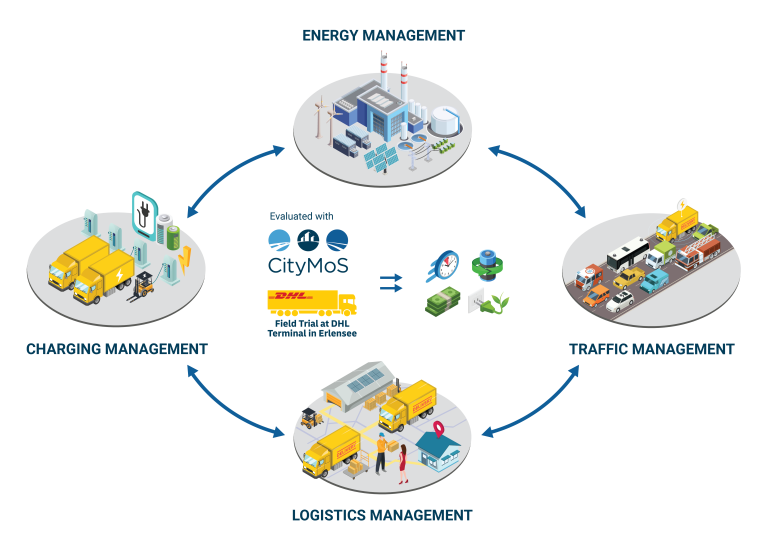

Was ist CiLoCharging?
CiLoCharging Optimierte Integration von Lade-, Logistik-, Energie- und Verkehrsmanagement für den Betrieb von Elektrofahrzeugen in stadtnahen Logistikdepots Das Projekt CiLoCharging hat sich zum Ziel gesetzt, durch die Berücksichtigung der Anforderungen aus den Domänen Energie, Logistik, Ladeinfrastruktur und Mobilitätsmanagement eine aus wirtschaftlicher, technischer und umweltpolitischer Sicht optimierte, flexible und bedarfsgerechte Lösung für den Einsatz von Elektrofahrzeugen […]
Read MoreTU München
Technische Universität München Lehrstuhl für Robotik, Künstliche Intelligenz und Echtzeitsysteme Der Lehrstuhl für Robotik, Künstliche Intelligenz und Echtzeitsysteme der Technischen Universität München von Prof. Alois Knoll forscht und lehrt im Bereich maschinelle Wahrnehmung, Kognition, Steuerung und Regelung. Die Gruppe forscht an diversen Themen vom Automotive Bereich bis zu medizinischen Robotern. Rolle im Projekt Im Projekt CiLoCharging baut der Lehrstuhl für Robotik, Künstliche Intelligenz und Echtzeitsysteme eine Simulationsumgebung […]
Read More